عنوان فارسی مقاله:طراحی بیومکانیکی اگزو اسکلتون اندام تحتانی برکلی((BLEEX))
چکیده
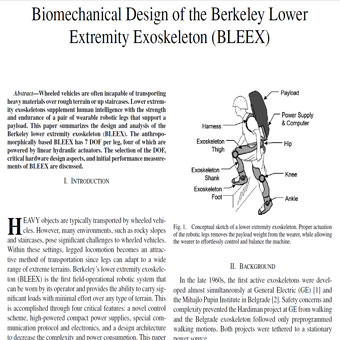
وسایل نقلیه چرخ دار اغلب قادر به انتقال مواد سنگین در مناطق صعب العبور و یا بالا بردن از پلکان ها نمی باشند. اگزو اسکلتون های اندام های پایینی مکمل با هوش انسانی دارای قدرت و دوام جفت پای رباتیک قابل پوشیدن هستند که قادر به تحمل وزن بار می باشند(طراحی بیومکانیکی اگزواسکلتون اندام تحتانی برکلی). این مقاله به خلاصه سازی طراحی و تحلیل اگزواسکلتون اندام پایینی برکلی BLEEX می پردازد.BLEEX مبتنی بر ریخت شناسی انسانی دارای ۷DOF در هر پا می باشد که چهار مورد از آن ها توسط محرک های هیدرولیکی خطی کار می کنند. انتخاب DOF، ابعاد طراحی سخت افزاری حیاتی و اندازه گیری عملکرد اولیه BLEEX مورد بحث قرار می گیرد(طراحی بیومکانیکی اگزواسکلتون اندام تحتانی برکلی).
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.