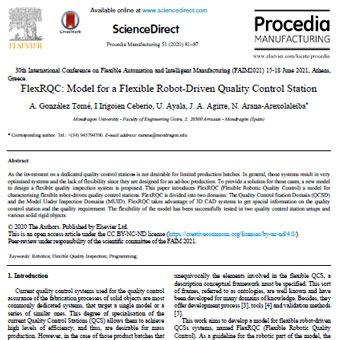
عنوان فارسی مقاله:FlexRQC: مدلی برای ایستگاه کنترل کیفیت قابل انعطاف با ربات
چکیده
از آنجا که سرمایه گذاری بر روی ایستگاه های کنترل کیفیت اختصاصی برای دسته های تولید محدود مطلوب نیست، به طور کلی، این سیستمها منجر به سیستمهای بسیار بهینه و عدم انعطافپذیری میشوند، زیرا برای یک تولید موقت طراحی شدهاند. برای ارائه راه حلی برای آن موارد، مدل جدیدی برای طراحی یک سیستم بازرسی کیفیت انعطاف پذیر پیشنهاد شده است. این مقاله FlexRQC (کنترل کیفیت رباتیک انعطافپذیر) را مدلی برای توصیف ایستگاههای کنترل کیفیت ربات محور انعطافپذیر معرفی میکند. FlexRQC به دو حوزه تقسیم می شود: دامنه ایستگاه کنترل کیفیت (QCSD) و دامنه های مدل تحت بازرسی (MUID ). FlexRQC از سیستم های سه بعدی CAD برای به دست آوردن اطلاعات فضایی در مورد ایستگاه کنترل کیفیت و الزامات کیفیت استفاده می کند. انعطافپذیری مدل با موفقیت در دو ایستگاه کنترل کیفیت و اجسام مختلف جامد آزمایش شده است(کنترل کیفیت قابل انعطاف با ربات).
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.